Regulador de Buceo, funcionamiento y diseño.
Nota del día 29/07/03, actualizada 22/2/18, por Ing. Guillermo Scionico, Instructor Trainer TDI-SDI.
En esta nota vamos a analizar la primera etapa de un regulador de buceo desde un punto de vista técnico, explicando el funcionamiento y desarrollando el modelo matemático, utilizando el concepto de un sistema realimentado de regulación. Aunque es un desarrollo que requiere un alto nivel matemático, haremos aclaraciones de funcionamiento y diseño que serán de utilidad práctica.Vamos a analizar el funcionamiento de un regulador a pistón balanceado denominado pistón transversal, ampliamente utilizado por muchas marcas, (Atomic Aquatics, Scubapro, Tusa, etc.).
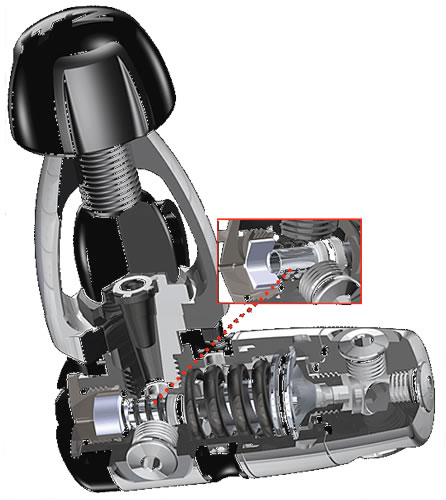
En la siguiente figur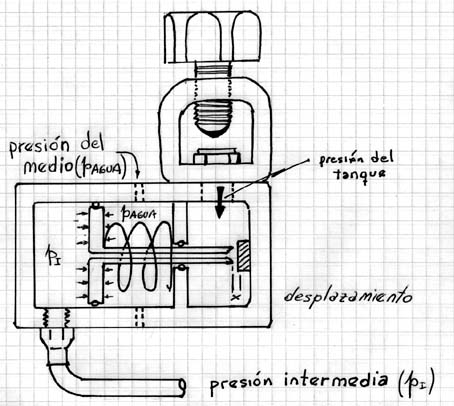 a vemos que la alta presión del tanque, ingresa a la primera etapa donde esta el asiento de alta presión. En los reguladores de pistón balanceado este se encuentra perforado y por lo tanto el flujo de aire pasa desde el tanque atravesando el pistón hasta la cámara donde sale la segunda etapa. Siendo esta presión menor y regulada, se la denomina presión intermedia (Pi, alrededor de los 140 psi).
a vemos que la alta presión del tanque, ingresa a la primera etapa donde esta el asiento de alta presión. En los reguladores de pistón balanceado este se encuentra perforado y por lo tanto el flujo de aire pasa desde el tanque atravesando el pistón hasta la cámara donde sale la segunda etapa. Siendo esta presión menor y regulada, se la denomina presión intermedia (Pi, alrededor de los 140 psi).
La cámara de presión intermedia (Pi) permite el funcionamiento balanceado pues actúa como un amortiguador dando un funcionamiento más suave con una respuesta dinámica rápida. Este es un sistema mecánico-neumático, donde hemos realizado simplificaciones para poder definir un modelo matemático simple y manejable, que represente el funcionamiento real. Podemos también observar la cámara media donde ingresa el agua del medio para poder de esta forma sensar la presión del medio ambiente. La presión del medio (Pagua) actuará a favor de la presión del resorte y en contra de la presión intermedia, de esta forma el regulador se entera de la profundidad a la que se encuentra y aumenta la presión intermedia a medida que nos hundimos para facilitar la respiración a profundidad. Cuando la presión intermedia llegue a un valor superior al de la ejercida por el resorte y el agua del medio, se cierra el ingreso de aire desde el tanque. Si no consideramos la presión ejercida por el medio ambiente, vemos que la presión del resorte iguala a la presión intermedia. Se denomina a esta la presión deseada o valor de referencia. Ni bien se inhala baja la presión intermedia y al superar el resorte dicha presión, se abre nuevamente el ingreso de aire.
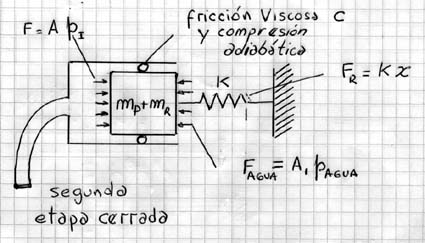
Considerando la segunda etapa cerrada (buzo que no inhala), esto forma un sistema realimentado donde la variable controlada es la presión intermedia la cual esta dada por la presión que ejerce el resorte. En algunos diseños este resorte puede comprimirse para ajustar la presión intermedia y en otros esta fijo y dado por la constante del resorte (denominada K).
En la figura anterior podemos ver todas las fuerzas que actúan en el regulador. Donde A y A1 son las áreas del pistón en sus caras, que multiplicadas por las presiones Pi y Pagua respectivamente representan las fuerzas ejercidas por la presión intermedia y la presión del medio. Kx es la fuerza ejercida por el resorte. Existe una fricción viscosa representada por la constante C y que depende de la velocidad, (suponemos un comportamiento adiabático de la compresión de la cámara, de muy pequeña variación de masa y linealizado). También esta el efecto de las masas del pistón y resorte, (mp y mr).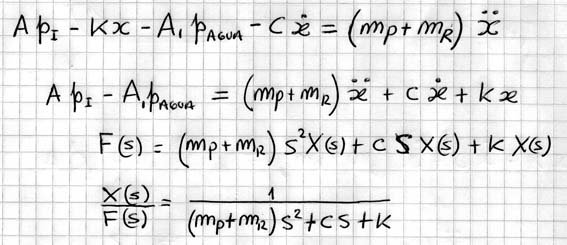
Aplicando la ecuación de la mecánica clásica y luego realizando la transformada de Laplace que nos permite simplificar una ecuación diferencial en una algebraica para facilitar su resolución, tendremos la transferencia del sistema mecánico.
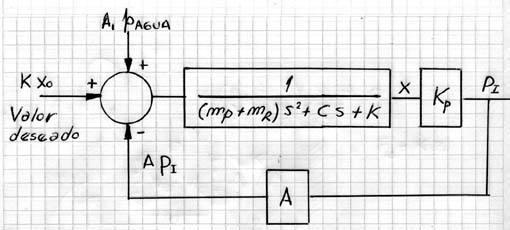
Si dibujamos el diagrama en bloques podemos ver exactamente la primera etapa como un sistema realimentado de control donde lo que se busca es regular la presión intermedia la que esta fijada por la constante del resorte (valor deseado) y que varía según aumente la presión del medio. La presión intermedia dependerá de la abertura del pistón con respecto al asiento de alta presión (variable x), y de la constante de proporcionalidad Kp.
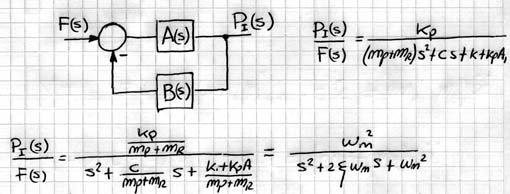
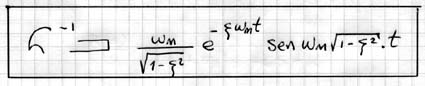
Este sistema puede resolverse resultando en un sistema de segundo orden. La respuesta dinámica o transitoria es una señal senoidal amortiguada, donde Wn es la frecuencia natural que depende del resorte y de la masa del pistón. A mayor masa del pistón y resorte menor Wn, lo que implica un tiempo mayor de respuesta.
![]()

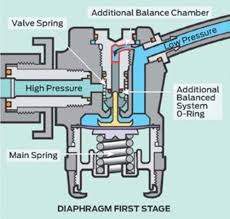 La diferencia entre los sistemas a pistón balanceado, de construcción más simple (el caso que estamos estudiando) y a diafragma radica en que los de diafragma poseen elementos con masa más pequeña que los hacen más rápidos, (ver ecuación de Wn), sin embargo estos tienen más piezas que hacen más complejo su mantenimiento, (en la foto se ve el asiento de alta presión, pieza metálica con inserto plástico). El estado de la tecnología en los diseños de reguladores de alta perfomance, (clasificados por la US Navy tipo A), utiliza tanto los reguladores a pistón balanceado como a diafragma teniendo cada uno sus fanáticos y detractores.
La diferencia entre los sistemas a pistón balanceado, de construcción más simple (el caso que estamos estudiando) y a diafragma radica en que los de diafragma poseen elementos con masa más pequeña que los hacen más rápidos, (ver ecuación de Wn), sin embargo estos tienen más piezas que hacen más complejo su mantenimiento, (en la foto se ve el asiento de alta presión, pieza metálica con inserto plástico). El estado de la tecnología en los diseños de reguladores de alta perfomance, (clasificados por la US Navy tipo A), utiliza tanto los reguladores a pistón balanceado como a diafragma teniendo cada uno sus fanáticos y detractores.
La variable E (epsilon) es el factor de amortiguamiento. Cuando C (amortiguamiento) es cero el factor es cero y el sistema se hace oscilante, lo que es característico de los reguladores a pistón no balanceados, de ahí que golpean más y su regulación de la presión intermedia no es tan buena. Poseen un esfuerzo de respiración mayor a bajas presiones del tanque y a profundidad, (en los sistemas No balanceados la brecha diferencial es mayor que en los balanceados). También vemos que las masas y la constante del resorte disminuyen el E, por lo tanto tarda más en establecerse el valor deseado de la presión intermedia, (hay mayor sobrepulso).
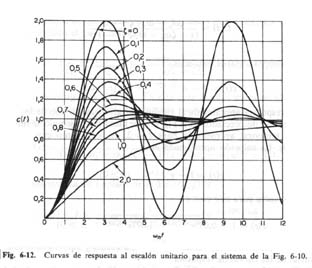
En el gráfico de la derecha podemos observar la respuesta de este sistema a una excitación escalón. (en análisis de sistemas de control se utilizan excitaciones patrones tales como la función impulsiva, función escalón y función senoidal. La respuesta a estas señales permite establecer el comportamiento del sistema en forma dinámica). Como podemos observar la respuesta es ágil cuando el E (factor de amortiguamiento) esta entre 0,4 y 0,7.
Hasta aquí hemos visto el comportamiento dinámico cuando la segunda etapa esta cerrada. Cuando inhala el buzo, la presión intermedia baja y circula flujo de aire desde el tanque a la segunda etapa. La bondad de un buen regulador hará que dicha presión baje poco para poder entregar el flujo necesario de aire al buceador.
Para ello se diseña el regulador con una resistencia baja al flujo de aire, (la resistencia se define como la variación de presión para el caudal entregado). La respuesta dinámica en este estado es similar a la estudiada anteriormente. Algunos reguladores tienen salida de alto flujo para conectar la segunda etapa que se diferencia de las otras salidas. Otros usan mangueras con diámetro interno mayor para disminuir esta resistencia. Una vez diseñado el regulador se lo debe exponer a pruebas para evaluar su comportamiento. Para ello se puede usar un registrador de presión intermedia (realizado con un trasductor de presión y un osciloscopio de almacenamiento, debido a las altas velocidades comprendidas), una bomba de aspiración que simule el flujo respiratorio del buzo, (especificada en litros por minuto) y un estanco con presión ajustable para simular la profundidad del buceo. Para más información sobre como se realiza un testeo de regulador ver INFO.
En este gráfico podemos ver la respuesta temporal de la presión intermedia en función del tiempo. En el diseño se busca que el sobrepulso y el tiempo de establecimiento sean pequeños sin alterar la estabilidad del sistema, (dados por la selección de Wn y E).
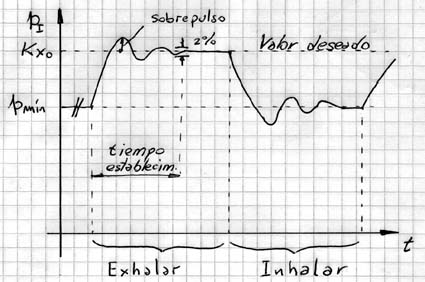
Al exhalar es válido el sistema realimentado y la Pi tiende a ser el valor deseado dado por la constante del resorte (K Xo, condición inicial del resorte). Al inhalar la Pi baja, debido a la resistencia al flujo de aire, cuando menor sea esta menor será la disminución de Pi. No puede hacerse cero esta diferencia salvo que la ganancia del lazo GxH sea muy elevado, lo cual lo hace un poco inestable en un sistema de tipo 0. Esta está dada por Kp (constante de proporcionalidad entre x y la Pi) y A (área del pistón). Por supuesto que aquí hay una consideración de compromiso pues aumentar Kp hace que no pueda hablarse de linealidad, siendo incorrecto este modelo y aumentar por el otro lado el área hace al pistón con más masa y empeora la respuesta dinámica. Espero que a aquellos que les interese en profundidad el funcionamiento del regulador, esta sea una herramienta interesante para comprender la interrelación entre los elementos que componen el regulador.













Add comment
Lo siento, debes estar conectado para publicar un comentario.